アヴィバ 点群とモデルの融合を実現した「E3D」
点群を別エンジンで表示、表示が格段に軽量に 2016.2.22 |
3次元レーザスキャナが使われ始めた当初、点群の処理に誰もが頭を痛めた。データ容量が膨大で、まともに取り込んでしまえば、ワークステーションが動かなくなる。点群は不要なノイズまでを取り込んでいるため、ワークステーション全体の稼働の障害となる。この解決のため、必要な点群を取り出す機能が強化されるなどの対策が講じられてきた。
こうした試行錯誤を経た、3次元レーザスキャニングの点群処理だが、これを根本的に解決したのが、アヴィバの「AVEVA Everything 3D(E3D)」だ。「E3D」は、レーザスキャンデータと3次元モデルの融合によるメリットを最大限に生かしたソリューションと言える。
アヴィバによって、レーザスキャンデータと3次元モデルの融合が可能になった背景には、2011年10月のLFMソフトウェア社の買収がある。買収以前にも、アヴィバはLFMソフトウェアとのパートナーシップを通じて、3次元レーザスキャンを駆使した最先端のソリューションを開発してきた。しかし買収により、アヴィバは広範かつ強力なレーザスキャンテクノロジーを提供できるようになった。
この買収により、アヴィバは「E3D」の開発が可能になったと言っても過言ではないだろう。そして、この開発で、最も注目すべきは、前述したような、膨大なデータ容量を持つ点群の処理を容易にしたことだ。
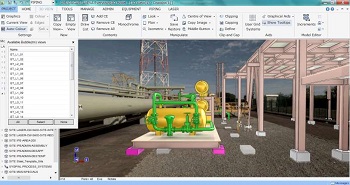
その開発では、別エンジンで点群を表示するため、表示が軽くなった。このため、追加モジュールが不要で、大量の点群データが3次元モデリングツールに表示できる。もちろん、点群データから、配管外径・距離・位置を計測できる。
それでも、すべての点群をモデル化するには、たいへんな労力が必要になる。このため、必要な部分だけをモデル化することも可能だ。この機能により、部分的な3次元モデル化やルート検討などが可能になる。
| |
 |
| |
E3Dの「バブルビューと3Dモデル表示」 |
また点群を変換して360°キャプチャデータのバブルビューの表示ができる。バブルビューを活用することで、現地の状況確認・計測が行える。これにより、限られた時間や様々な制約の中、何度でも、ディスプレイ上で現場における詳細な確認が可能になる。
さらに、バブルビュー表示によるクラッシュチェック機能を活用すれば、配管の干渉が確認できる。ここで、既設のモデルを取り込んでいれば、新設と既設の空間の取り合いができ、効率的な干渉チェックが可能だ。もしここで、干渉が発見されれば、設計段階で修正できる。同時に、点群では、拡大した場合に、前後関係が分からないといった問題も起こる。ここで、バブルビュー機能を活用すれば、写真と同じクオリティのため、前後関係が分かりやすい。
「E3D」では、「点群とモデルが混在したデータをいかに活用するか」に着眼して開発された。この着眼が端的に示されているのが、点群の部分削除だ。削除した点群箇所へ新規モデルを作成し、図面を作成できる。点群を360°キャプチャデータとして、バブルビュー表示できる機能は、点群を使いやすくする機能でもある。
そして、点群を別エンジンで動かすことで、ワークステーションの他の機能に影響を与えないなど、これまで、点群処理において、頭の痛い問題を解決している点が注目される。
アヴィバでは、「E3D」の他に、買収したLFMソフトウェアが、点群処理サービスも行っている。
これはクラウド上に点群データを預けておけば、アヴィバがデータを適切に処理するものだ。このサービスにより、処理されたデータは、点群データ、ネットビュー、ハイパーバブルといった状態で出力される。このサービスは、LFMソフトウェアにより行われている。
アヴィバは、2011年10月にLFMソフトウェアを買収して、「E3D」の開発の糸口を掴んだが、LFMソフトウェアが点群処理のサービスにも乗り出している。買収を通じて、アヴィバは点群処理のプロになったと言えるだろう。 |
|
|
|